
The inherent instability of a helicopter means even an IFR-rated pilot may get into trouble in cloud
By Brendan Reinhardt
A typical accident report for a single-engine helicopter in bad weather often begins with entering cloud before the helicopter pilot loses control. The helicopter turns every which way and there is no letting go until the helicopter hits the ground.
Typically, the pilot isn’t instrumented rated nor is the aircraft equipped with an IFR instrument panel. Both of these issues are obvious candidates for the final holes in the Swiss cheese.
And if the helicopter is not designed for instrument flight, a pilot who has a current instrument rating will still struggle to maintain control in IMC.
The inherent dynamic instability of helicopters means that flight into cloud is not just a trap for the untrained in a poorly instrumented aircraft. Do it without some form of stability system or autopilot and your flying skills and cockpit instrumentation is likely to not be up to the task—your ride will be every which way but loose.
HeliSAS—a system designed for Robinson and other light helicopters (although only certified for VFR conditions)—is a form of simple autopilot. What is a system like HeliSAS trying to achieve? Isn’t an instrument-rated pilot and an IFR instrument panel sufficient to undertake IFR flight?
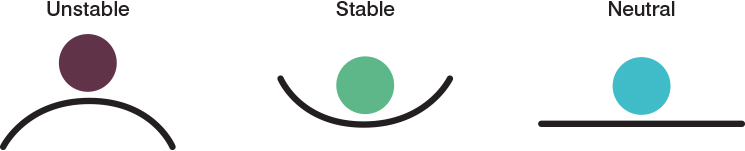
To analyse this, consider static stability, which looks at the tendency of the helicopter to return to its original state after a disturbance and can be visualised by thinking of a marble on a surface.
If the marble is on a flat surface and there is a disturbance, the marble will move. When the disturbance is removed, the marble will stop in a new position. This is called neutral static stability.
If the marble is on a concave-shaped surface and is disturbed, it will move and, when the disturbance is removed, will roll back to where it started from. This is called positive static stability.
If the marble is on a convex surface and is disturbed, it will keep moving away from where it was when the disturbance is removed. This is called negative static stability.
In the helicopter we need to consider the main rotor and flap back. If there is a disturbance and the aircraft moves, a small wind is generated which causes the advancing blade to flap up, the disk tilts and the rotor thrust leans over providing a force that moves the helicopter back to where it was. Helicopters are statically stable in the hover, in the pitch and roll axes. In forward flight, again in the pitch and roll axes, the flapping to equality and flap back mean the helicopter is statically stable in these axes.
Dynamic stability considers the long-term motion. The helicopter may move back to its previous position after a disturbance, but does it go straight there or oscillate about the previous position?
In the hover, helicopters are dynamically unstable in pitch and roll. In forward flight, the helicopter is typically dynamically unstable in pitch and roll.
There are some design features that help to minimise this or increase the time period of the oscillations so that the average pilot can control the helicopter. Stabiliser bars and horizontal stabilisers are some simple features that can be applied.

In simple day VFR helicopters, the flying pilot is the autopilot who keeps the aircraft stable by reference to a horizon. The dynamic instability is gentle enough by nature of its amplitude and time period that the pilot can maintain the aircraft visual attitude easily and will mostly think the wanderings experienced are a result of normal atmospheric turbulence or poor attention.
However, if we consider IFR operations where the visual cues are much less, the certification agencies require specific stability requirements. This is outlined in the FAR 27 appendix B. For single-pilot approval, the first provision is: any oscillation having a period of less than five seconds must damp to half amplitude in not more than one cycle.

If the dynamic stability has low period but quickly damps or if the period is long enough but doesn’t diverge rapidly, then a lone pilot can cope with it.
The visual horizon by day provides a strong cue that allows the pilot to detect that the attitude has changed early to prevent any large divergence occurring. However, when you remove those visual cues by flying at night without a horizon or in cloud, then picking up the attitude changes is harder and the aircraft will diverge more before the pilot notices.
Intense concentration is required to keep the aircraft flying at a constant altitude and speed. This means there isn’t much spare brain capacity to do other tasks like radio calls, system management or even fill out a navigation log.
If the basic aircraft cannot meet the FAR requirements, then the manufacturer may add systems to help the pilot. A stability augmentation system (SAS) may be added that detects small attitude changes and puts in an opposite correction to damp the disturbance or oscillations. The system has to be very fast acting and so the authority is limited to account for any malfunction.
The next level of help for the pilot is to allow an autopilot to maintain an attitude. This uses slow-acting large authority actuators to maintain the aircraft attitude. Further autopilot modes are added that take inputs from air data systems to allow the aircraft to hold an altitude, heading or speed. In this way the pilot can take their hands completely off the controls to do other tasks or do the monitoring function.
This is why we see that single-pilot helicopters approved to fly IFR will have a number of higher-level autopilot functions to allow the aircraft to fly itself while the single pilot monitors the aircraft behaviour or does other tasks. These systems are called automatic flight control systems and can maintain height, airspeed and heading, capture these parameters, conduct instrument approaches and even level off to a hover.
Let us now consider a basic Robinson or Jetranger helicopter. These helicopters normally have no stability systems, there isn’t even a SAS.

The base helicopter is unlikely to be dynamically stable and meet FAR 27 appendix B certification requirements. You may have the instruments to tell you which way is up (attitude indicator) but the workload to maintain straight and level without the normal strong visual cues is going to be very high. It is completely up to the pilot to provide the stability for the helicopter.
Even an IFR-rated pilot who is proficient and enters cloud in a helicopter not designed for instrument flight will have difficulty maintaining control. Without the normal strong visual cues of a horizon, the pilot will quickly experience dynamic instability and be fighting the aircraft to maintain a stable altitude and airspeed.
Eventually the pilot may get out of phase with the aircraft response and now the control inputs are making the instability worse—pilot-induced oscillations.
Excessive control inputs may cause the rotor blades to strike the tail boom. Even an IFR-rated pilot with appropriate cockpit instrumentation may lose control of a helicopter that doesn’t have a basic level of autopilot.




Comments are closed.